Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
WallE
von Franziska Schumann, Furkan Yildiz und Philipp Jacobs
Der Name spricht für sich: WallE ist ein Aufräumroboter, dein Freund und Helfer. Du hast eine Party geschmissen und keiner hilft dir dabei, Ordnung zu schaffen? WallE erledigt den Kleinkram für dich. Er ist flexibel und kann sowohl auf dem Boden oder auch erhöhten flachen Oberflächen arbeiten. So kann er auch die verworfenen Entwürfe deine Hausarbeit aufsammeln und damit das Chaos auf deinem Schreibtisch beseitigen.

Projektdokumentation - WallE
Einführung
WallE ist ein Aufräumroboter, der sich auf einem Tisch oder einer anderen flachen Ebene frei bewegen (fahren) kann und dort Müll einsammelt. Der Ablauf sieht dabei folgendermaßen aus: Die Ebene sucht er, sobald er eingeschaltet wird, kontinuierlich nach Gegenständen ab. Hat er einen solchen erkannt, dreht er sich auf der Stelle in Richtung des Gegenstands, fährt solange darauf zu, bis der Gegenstand die Lichtschranke vorn an der Schaufel durchbricht und sammelt diesen dann mit seiner Schaufel auf. Dabei beschränkt die Größe der Schaufel natürlich auch die Größe der Gegenstände, die der Roboter aufsammeln kann. Im Idealfall behält er bereits eingesammelten Müll auch bei sich. Danach fängt er wieder mit der Suche nach weiteren Gegenständen an. Gelangt er an eine Kante, dreht er sich von dieser weg, um nicht hinunterzustürzen. Nach diesem Manöver beginnt der Roboter seine Suche erneut. Ursprünglich war geplant, dass er sich nach Erledigung seiner Arbeit wieder zu seinem Startpunkt begibt, welcher im Idealfall eine Plattform ist, die ihn zu einem anderen Tisch fährt. Wir gehen davon aus, dass in WallEs Umgebung nur Gegenstände liegen, die er auch aufsammeln soll, da WallE nur erkennt, dass etwas vor ihm ist, nicht jedoch, ob dieser Gegenstand Müll oder etwas anderes ist.
Den allgemeinen Ablauf erkennt man sehr gut in diesem Zustands-Diagramm:

Umsetzung
Die verschiedenen Baugruppen der Roboters lösen unterschiedliche Teilprobleme:
- Karosserie: bildet das Grundgerüst des Roboters
- Arduino: zentrale Recheneinheit und Stromversorger
- Akku: versorgt die Stepper-Motoren mit Strom
- Infrarot-Abstandsmesser: misst den Abstand zu vor dem Roboter liegenden Gegenständen bzw. zur Tischplatte
- UV-LEDs neben Photransistoren: Die LEDs strahlen an den Seiten des Roboters auf den Boden und die Photransistoren messen die Lichtstärke, dadurch kann erkannt werden, wann der Roboter sich an einer Kante befindet
- Stepper-Motoren: zwei treiben den Roboter an, einer dreht den Infrarot-Abstandsmesser
- Schaufel mit Servo: zum Einsammeln, der Servo treibt den beweglichen Teil der Schaufel an
- Lichtschranke an der Schaufel: bestehend aus einer UV-LED und einem Phototransistor. So ist klar, wann der Roboter beim Gegenstand angelangt ist.
Karosserie
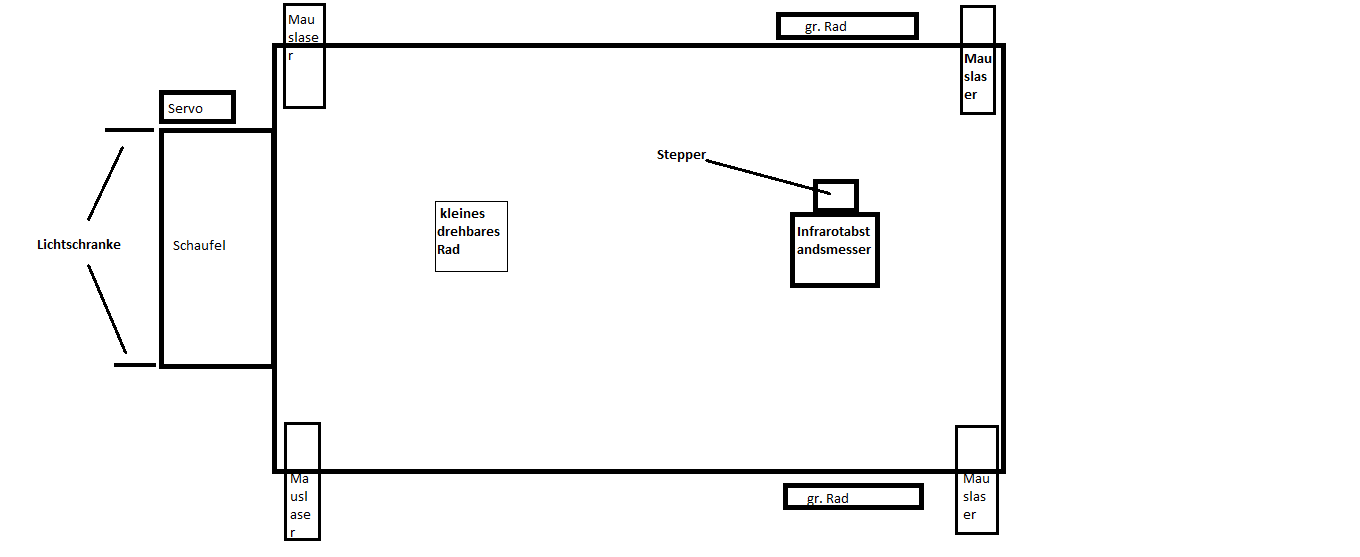
Unsere Karosserie besteht aus einer Rechteckigen Holzplatte, an der alle weiteren Teile angebracht sind. Am Heck des Roboters sind unten die beiden Stepper, die für den Antrieb des Roboters sorgen. Auch unten, aber in der Mitte, befindet sich ein drehbares Rad ohne Antrieb; so kann WallE sich drehen. Am vorderen Teil ist die Schaufel angebracht und an den vier Ecken befinden sich die selbstgebauten „Mauslaser“ ( eine Kombination aus UV-LED und Phototransistor). Das letzte Teil ist der Infrarot-Abstandsmesser, der auf einem Holzblock im hinteren Teil des Roboters sitzt.
Arduino
Der Arduino ist der Kopf des Roboters. Er steuert alle Sensoren, die Stepper und den Servo, der den beweglichen Teil der Schaufel steuert. Der Arduino sorgt dafür, dass alle elektronischen Teile genau dann ihre Funktionen ausüben, wenn sie an der Reihe sind. Zuerst wird der Infrarot-Abstandsmesser angesteuert, wenn dieser etwas wahrnimmt, sorgt der Arduino dafür, dass die Stepper so angesteuert werden, dass der Roboter zu dem wahrgenommenen Objekt fährt. Vorne an der Schaufel ist eine Lichtschanke, wenn diese unterbrochen wird, steuert der Arduino den Servo an, der sich daraufhin dreht und den Müll einsammelt.
Akku
Der Akku sorgt schlicht und einfach für die Wechselstromversorgung des Systems. Ohne den Akku würden z.B. die Stepper sich nicht bewegen können. Der Akku ist allerdings auch die größte Gefahrenquelle, wie wir selbst mehr als einmal erfahren mussten. Verursacht man einen Kurzschluss, während der Akku ans System angeschlossen ist, kann es zu einem Brand kommen. Im besten Fall schmoren nur die Kabel durch.
Infrarot-Abstandsmesser
Der Abstandsmesser dient der Erkennung der aufzusammelnden Gegenstände. Er sendet ein Infrarotlicht aus, welches von den Gegenständen reflektiert wird. Das reflektierte Licht wird von einem Phototransistor empfangen. Uns interessiert nicht so sehr, in welchem Abstand der Gegenstand vor dem Roboter liegt (der Infrarot-Abstandsmesser ist sowieso in einem festen Winkel auf die Tischplatte gerichtet), sondern dass plötzlich ein andere Abstand als der zur Tischplatte wahrgenommen wird. Das heißt nämlich, dass dort ein Gegenstand liegt.
UV-LEDs neben Phototransistoren
Diese Sensoren funktionieren ähnlich wie der Abstandsmesser. Auch sie senden Infrarotlicht aus und je nach der Stärke der Reflexion weiß der Roboter, ob er über der Kante ist oder noch auf den Tisch. Die Tischplatte reflektiert das Licht nämlich stärker als der Boden, der weiter weg ist.
Stepper-Motoren
Die Stepper sorgen für die Bewegung der Räder bzw. für das Drehen des Abstandsmesser. Die Stepper drehen sich, wie der Name schon sagt Schritt für Schritt; so sind sie sehr präzise. Die Gegenstände können genau angesteuert werden und der Sensor wird in kleinen Schritten gedreht. Der Stepper kann sich mit kleinen Schritten drehen, weil er durch ein schrittweise rotierendes elektromagnetisches Feld gesteuert wird.
Schaufel mit Servo
Die Schaufel befindet sich teils unter WallE und ragt nach vorne. Sie ist wie ein viereckiger Korb geformt, und so angebracht, dass WallE einmal eingesammelte Gegenstände möglichst behält. An dem Schaufel-Design haben wir lange geseesen und verschiedenes ausprobiert. Diese Lösung funktioniert am besten, trotzdem definitiv nicht fehlerfrei Fallen die Werte, die vom Phototransistor der Lichtschranke kommen, stark ab, bekommt der Servo den Befehl, sich um 90° zu drehen. Dieser Servo sitzt auf dem festen Teil der Schaufel und an ihm ist die Klappe der Schaufel befestigt. Dreht er sich, so schiebt er den Gegenstand, der vor der Schaufel liegt, auf diese und weit nach hinten.
Ein Fehler, der leider noch häufig auftritt, ist, dass die Klappe es nihcht ganz schafft, die Gegenstände auf dieSchaufel zu schieben. Außerdem ist die Schaufel aus Pappe gebaut und somit ist vor allem die Klappe nicht sehr stabil.
Lichtschranke an der Schaufel
Auch die Lichtschranke besteht aus einer Infrarot-LED und einem Phototransistor. Anders ist hierbei, dass hier der Phototransistor direkt angestrahlt wird. Sobald ein Gegenstand den Lichtstrahl unterbricht, fallen die Werte, die der Arduino vom Phototransistor empfängt. Diese Werte hängen nämlich davon ab, wieviel Licht auf den Phototransistor trifft. Wenn WallE eingeschaltet wird, ist die LED noch ausgeschaltet, damit der Phototransistor erst einmal das Umgebungslicht messen kann; dieses kann dann von den späteren Werten weggerechnet werden. Danach wird die LED eingeschaltet und bleibt dies auch, bis WallE ausgeschaltet wird.
Bauteile
| Bauteil | Anzahl |
|---|---|
| Stepper-Motoren | 3 |
| DRV 8834 driver chip | 3 |
| Arduino mini | 1 |
| große Räder | 2 |
| kleines Rad mit Kugellager | 1 |
| Infrarot-Abstandsmesser | 1 |
| UV-LEDs | 5 |
| Phototransistoren | 5 |
| Servo | 1 |
| Akku | 1 |
| div. elektronische Bauteile wie Kondensatoren, Widerstände, Kabel etc. | viele |
Für die Karossierie haben wir haben wir Holz und Schrauben, für die Schaufel Pappe verwendet.
Pinbelegung am Arduino
| Pin | Anschluss |
|---|---|
| A0 | Phototransistor der Lichtschranke an der Schaufel |
| A1 | Phototransistor hinten rechts |
| A2 | Phototransistor hinten links |
| A3 | Phototransistor vorne rechts |
| A4 | Phototransistor vorne links |
| A5 | Servo |
| A6 | Infrarot-Abstandsmesser |
| D2 | Steppermotor des rechten Rades, STEP |
| D3 | Steppermotor des rechten Rades, DIR |
| D4 | Steppermotor des linken Rades, DIR |
| D5 | Steppermotor des linken Rades, STEP |
| D6 | Steppermotor oben, STEP |
| D7 | Steppermotor oben, DIR |
| D10 | LED vorne rechts |
| D11 | LED vorne links |
| D12 | LED Schaufel |
Ergebnis
WallE erfüllt fast alle seine Aufgaben. Er sucht und findet Objekte auf der Ebene und fährt auch dort hin. Jedoch funktioniert das Schaufelsystem von WallE nicht perfekt. Da die Schaufel nicht ganz auf dem Tisch aufliegen kann, ohne den Roboter in seiner Bewegung einzuschränken. Sicherlich ist dieses Design noch stark verbesserungsfähig. Außerdem merkt WallE mithilfe seiner von uns selbstgebauten „Mauslaser“, wann er eine Tischkante erreicht und dreht sich immer von der Kante weg. All unsere Sensoren sind allerdings lichtabhängig und so kommt es zu starken Fehlern, wenn sich während eines Programmdurchlaufs die Lichtverhältnisse im Raum ändern. Die ursprünglich angedachte Koorperation mit einer anderen Gruppe wurde auch nicht mehr durchgeführt, dies kann allerdings noch geschehen.
Code
Der komplette Code walle.zip