Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
Hardware und Aufbau
Grundsätzlich kann gesagt werden, dass wir unseren Fokus von Anfang an nicht auf den Hardware-Aufbau gelegt haben. Primär haben wir an der Software gearbeitet, und die malokal-Hardware dabei nur schrittweise weiterentwickelt und verbessert. Das hatte zwar zur Folge, dass wir drei verschiedene Prototyp-Versionen (siehe unten) gebaut haben. Gleichzeitig hat der Fokus auf die Software aber auch dafür gesorgt, dass der malokal am Ende recht gut funktioniert.

Grundlegender Aufbau und Fokus
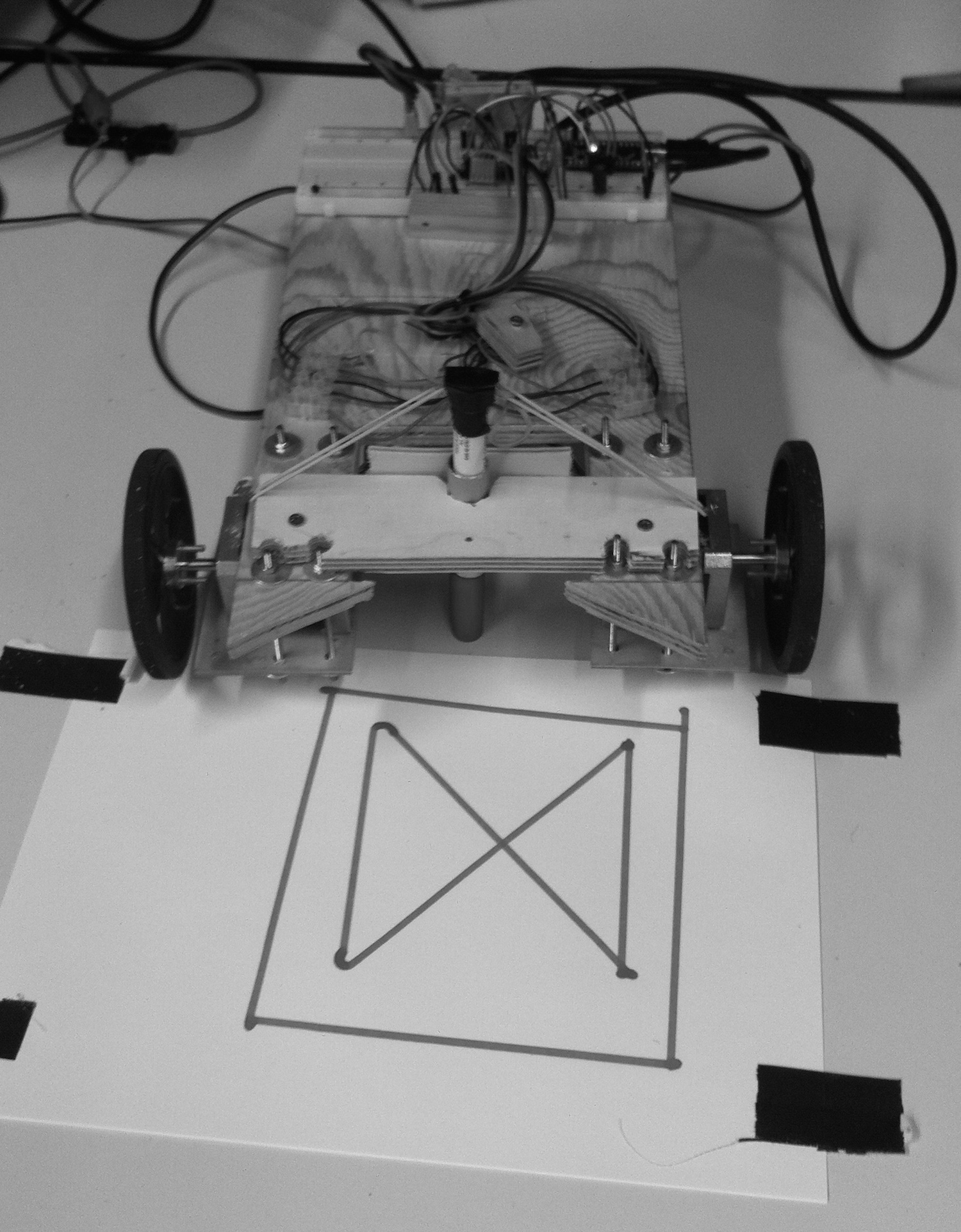
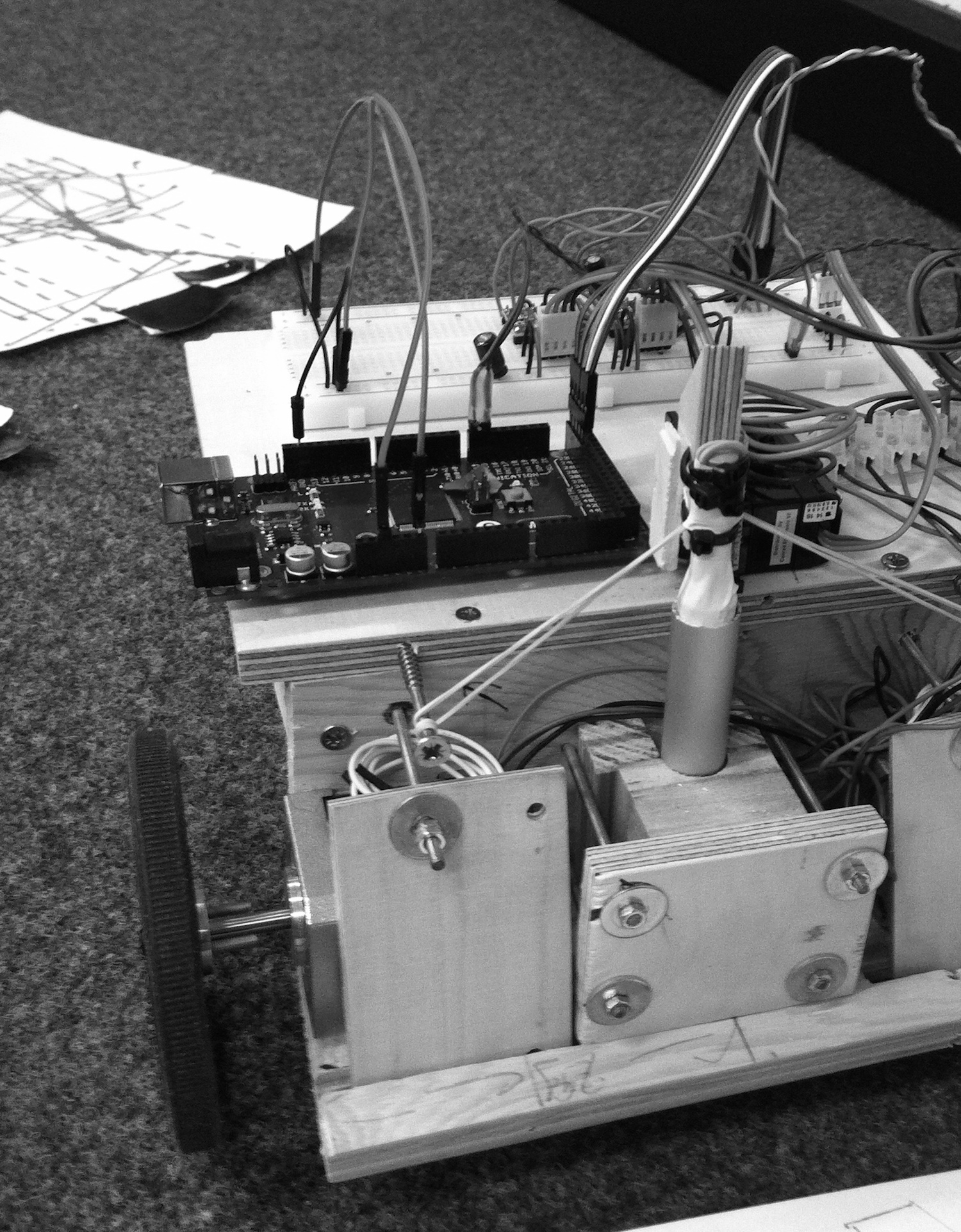
Das Grundgerüst von malokal besteht aus Holz. Auf der Grundplatte befinden sich Arduino Mega, WiFly, Breadboard und Servo-Motor für den Stift. Auf der Unterseite der Grundplatte ist das Stützrad befestigt und der Akku angebracht. Im vorderen Bereich von malokal sind die Schrittmotoren und der Stift platziert (siehe Bilder).
malokal dreht sich, in dem er seine Räder entgegengesetzt laufen lässt. Sitzt der Stift dabei genau zwischen den Motoren, ändert sich die Position des Stifts theoretisch nicht, er würde sich um seine eigene Achse drehen und einen sauberen Punkt malen. Außerdem verringert sich der Winkelfehler beim Drehen mit genau ausgerichteten Motoren enorm-
Für gute Zeichenergebnisse ist es also sehr wichtig, dass die Motoren sowie der Stift richtig platziert sind. Zum einen müssen die Schrittmotoren zueinander möglichst genau ausgerichtet sein. Das heißt, dass die Achsen beider Motoren auf einer Linie (am besten in jeder Dimension) sein müssen. Weiterhin sollte der Stift genau in der Mitte dieser Linie liegen.
Anfangs haben wir die sterblichen Überreste eines noch im Robotik-Raum liegenden Roboters benutzt. Die Motoren waren hier mehr schlecht als recht eingeklemmt. Sie konnten zum einen leicht verrutschen, und zum anderen nur schwer in eine genaue Position gebracht werden. Auch die Stifthalterung wurde nur sehr provisorisch gehalten. Nachdem malokalOS und malokalRemote betriebsbereit waren, entschieden wir uns für einen zweiten Aufbau, der der Software gerecht wurde. Dank der Positionierung der Motoren an einem rechten Winkel an der Holzkonstruktion konnten erhebliche Verbesserung erzielt werden. Zur Präsentation des Projekts wurde dann nochmal die Motorhalterung mit Hilfe von Stahlwinkeln aus dem Baumarkt sowie die Stiftposition überarbeitet.
Der erste Prototyp aus Teilen von anderen Robotern
Kompletter Neubau
Verbesserung der Motoraufhängung durch Stahlwinkel
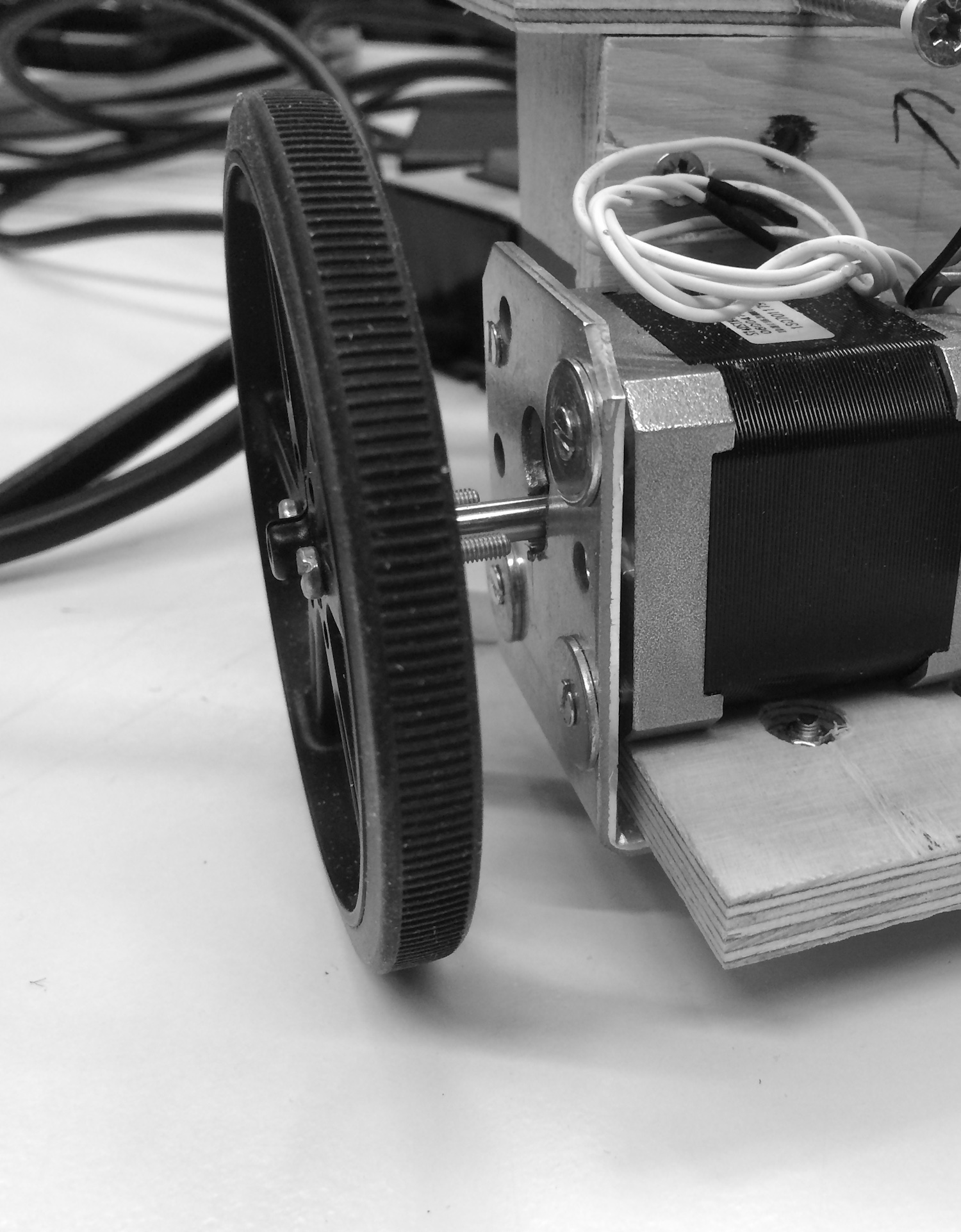
Schrittmotoren
Wie oben bereits beschrieben, bewegt sich malokal mit Hilfe von zwei NEMA-17 Schrittmotoren. Diese ermöglichen sehr präzise Bewegungen, da sie „schrittweise“ angesprochen werden. Damit ergeben sich aber komplexere Anforderungen bzgl. der Ansprache der Motoren. Ein einfaches „Strom an“ und „Strom aus“ funktioniert nicht. Abhilfe geben Schrittmotor-Treiber (siehe „Elektronik“).

Stift und Servo
Natürlich sollte malokal auch zeichnen können. Dazu installierten wir einen Stift, der in einem Alu-Rohr mittels Servo-Motor hoch und runter gefahren werden kann. Ein Gummi sorgt dabei für die nötig Kraft richtung Boden. Wir haben dabei bewusst (bis jetzt) auf komplizierte Konstruktionen (wie etliche aus den Vorjahren) verzichtet.

Elektronik
Das „Gehirn“ von Malokal ist ein Arduino Mega. Wir haben anfangs einen Arduino Nano benutzt, da dieser sehr kompakt ist, und wir schon im Kurs damit gearbeitet haben. Im Laufe der Zeit wurde malokalOS, das auf dem Arduino läuft, immer größer, es kamen diverse Bibliotheken dazu und die Speicherung der Fahrbefehle in einem Array war sehr begrenzt (trotz Ringpuffer). Diese und andere Gründe bewegten uns dann dazu, doch auf einen deutlich größeren (sagt ja schon der Name) Arduino MEGA umzusteigen. Vier UARTs, mehr Speicher und mehr Power vereinfachten vieles.
Da, wie bereits gesagt, das Ansprechen der Schrittmotoren etwas komplexer ist, nutzten wir Schrittmotor-Treiber. Per Mikrocontroller sagt man diesen, dass man einen Schritt fahren möchte, und in welche Richtung dieser laufen soll. Der Treiber übernimmt dann die Ansprache des Schrittmotors.
Für die WLAN Kommunikation haben wir ein WiFly-WLAN-Modul verbaut.
Energie bezieht malokal aus einem an der Unterseite der Grundplatte angekletteten LiPo-Akku mit 7,2 V.

Teileliste
1 × Ardunio MEGA Klon von DFRobot
1 × WiFly RN-XV von Roving Networks
2 × Nema 17 Schrittmotoren
2 × Gummierte Räder
1 × frei drehendes Laufrad
2 × Stepper Motor Driver von Pololu
1 × Servo
1 × Stift, wechselndes Modell
1 × LiPo-Akku mit 7,2 V
Schaltplan
Dieser Schaltplan zeigt schematisch alle Bauteile und deren Verbindungen.

weiter zu Teil 2
Software — malokalRemote, manuellRemote, Protokoll, malokalOS
- Die Fotos sehen sehr gut aus, und der Text gibt einen guten Eindruck davon, welche Ideen hinter der Konstruktion stecken.
- Ein aufwändiger, kompletter und schön anzuschauender Schaltplan wurde erstelllt.
- Bilder der aktuellen Version des Roboters gibt es noch nicht - da habt ihr euch das Leben mit eurem Engagement etwas schwerer gemacht, als nötig…
Insgesamt sehr gut.