Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
Pläne für die Zukunft
Was wir von unserem ursprünglichen Plan (bisher) nicht umsetzen konnten oder wollten.
Umsetzung von malokalV4 — geplant
Malokal hat zwar schon mehrere Rundum-Erneuerungen hinter sich (siehe Hardware und Aufbau). Trotz aller Mühen sieht er dabei aber immer noch ziemlich gebastelt aus. Wünschenswert wäre ein sauberes Fahrgestell, das sowohl besser aussieht, als auch präziser gefertigt wäre. Damit könnten Winkelabweichungen und Ungenauigkeiten beim Zeichnen nochmals minimiert werden.
Eine für uns relativ leicht umzusetzende Möglichkeit ist das Drucken eines Fahrgestells mit einem 3D-Drucker, der unserer Gruppe zur Verfügung steht. Dafür sind natürlich 3D-Dateien nötig. Erstellt haben wir diese teilweise mit SketchUp (eher das „Paint“ unter den 3D-Programmen) und dem professionelleren Programm SolidEdge von Siemens.
Entwurf 01
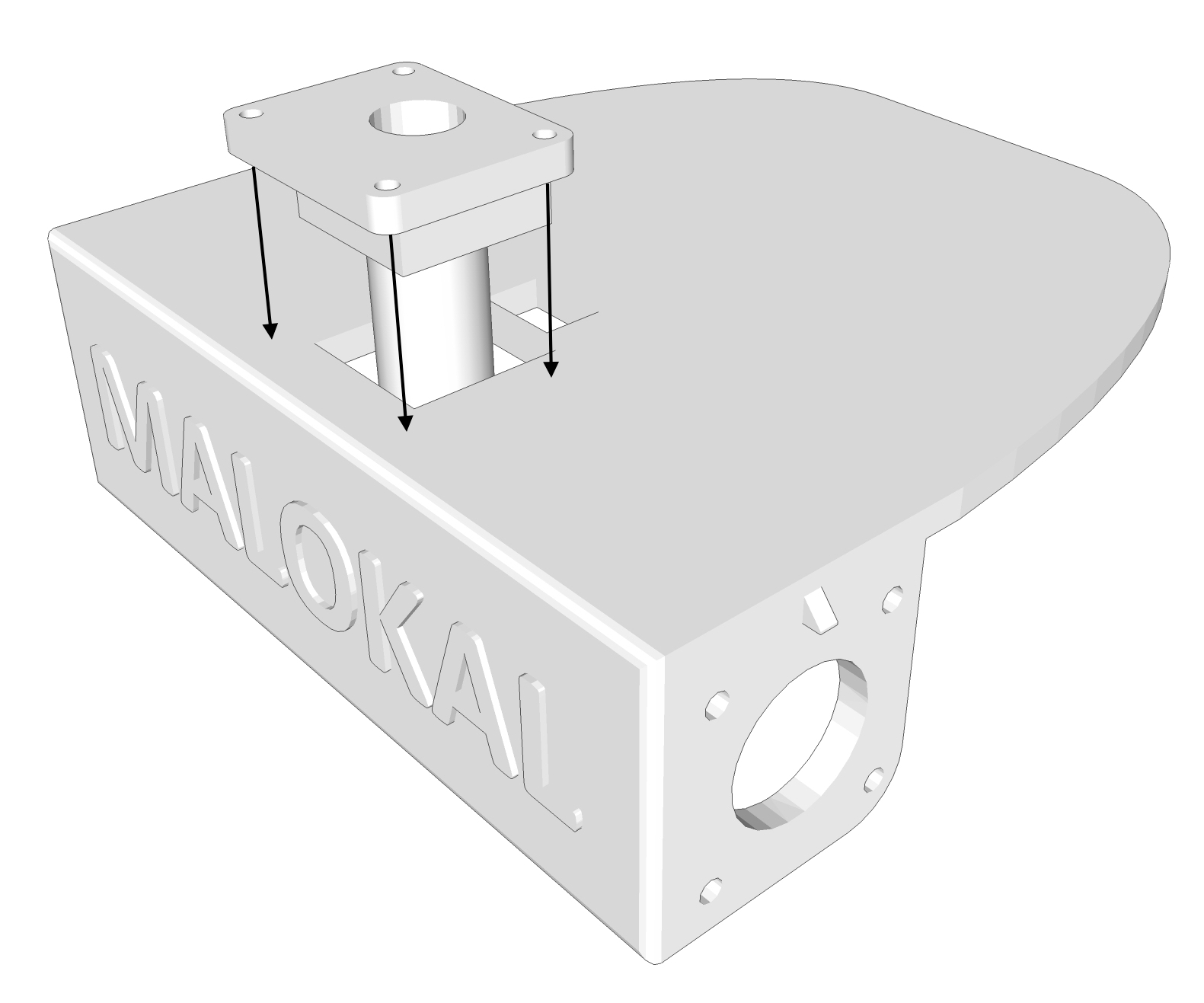
Der erste Entwurf sieht eine solide Grundplatte vor, an der die Motoren direkt befestigt werden können. Der Stift soll eine eigene Halterung bekommen, die modular aufgebaut werden soll. Das würde es uns ermöglichen, auch andere Medien (Kreide, verschiedene Stifte, zwei nebeneinander….) einzusetzen. Verbunden mit einem besseren Fahrwerk sollte evtl. auch die Elektronik verlötet und in eine eigene Box verlegt werden.
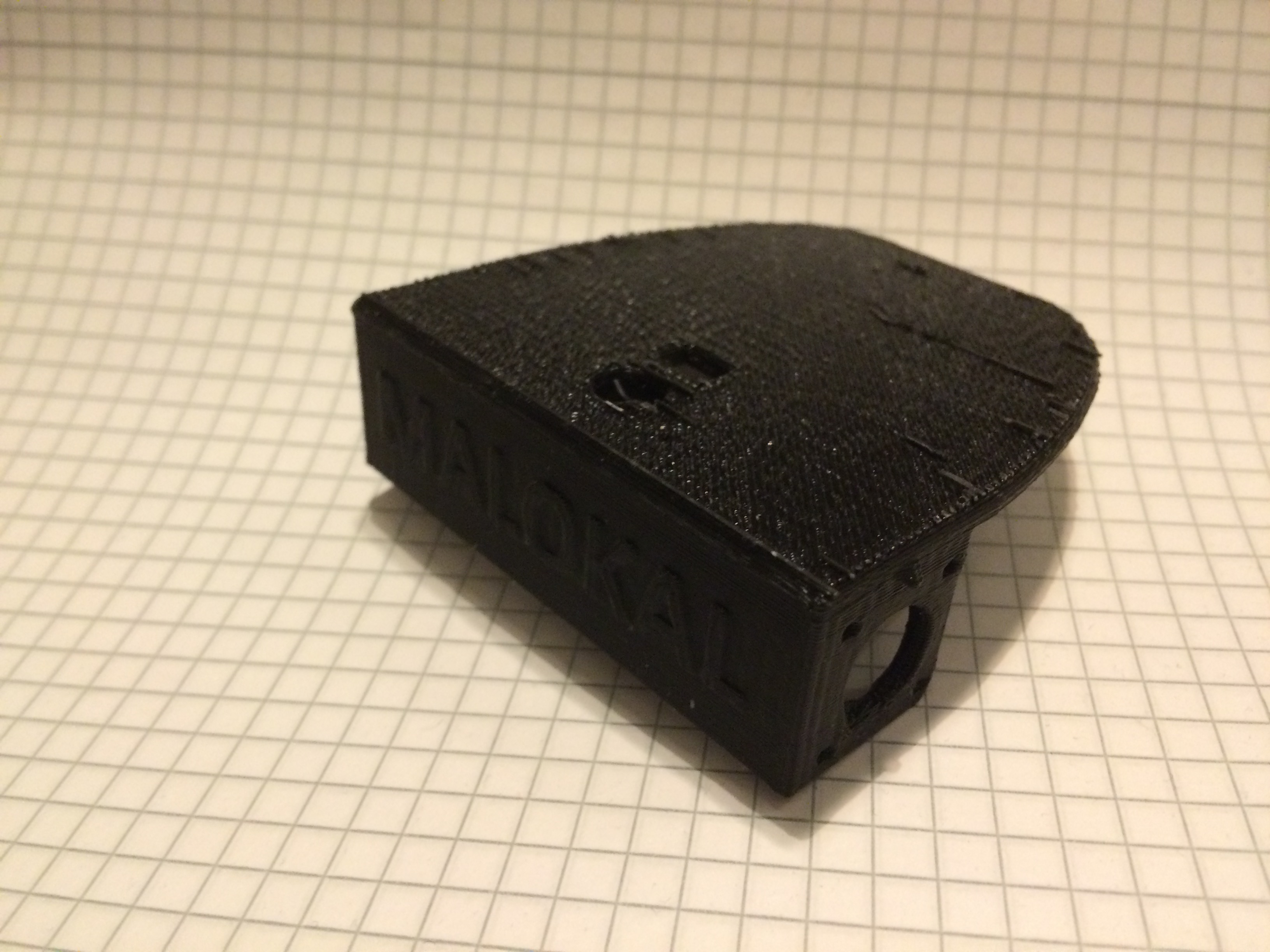
Das Bild links zeigt den Plan, das Bild rechts ist der erste Druck, Maßstab ca 1:2,5.
Entwurf 02
Der zweite Entwurf ist ein komplettes 3D-gedrucktes Gehäuse in 3 Teilen. Das schwarze Bodenelement besitzt gedruckte Befestigungen für die Motoren, sowie eine flexible Befestigung für den Stift in der Mitte. Das Laufrad sitzt an einer Seite in einem kleinen Loch. Die Motoren sind komplett verkleidet. Für die Räder gibt es Aussparungen an der Unterseite. Die weiße Platte besitzt einen Schlitz rund herum, in den ein dünner gebogener Plexiglasstreifen eingelassen und verklebt ist. Das schwarze Teil besitzt ebenfalls diesen Schlitz, ist jedoch nicht mit dem Plexiglas verklebt. So kann der weiße Deckel samt Plexiglas einfach abgenommen werden.

Kurven fahren — eventuell
Ein weiterer Punkt, der zu verbessern wäre, ist das Kurvenfahren.
Im Moment splittet die Geomerative-Library Kurven in kleine gerade Strecken. Malokal muss sich nach jeder kurzen Strecke (teilweise nur wenige mm lang) neu ausrichten.
Stellt man sich den Buchstaben „O“ vor, entstehen beim Abfahren des Pfades enorm viele Drehungen. Das dauert zum einen lange, ist aber auch auf Grund der sich aufaddierenden Winkelabweichungen problematisch. Es wäre daher durchaus sinnvoll, Code zu implementieren, der den Motoren abhängig vom Radius der zu fahrenden Kurve verschiedene Geschwindigkeiten zuweist.
Da setzt mathematisches Verständnis von Bezier-Kurven (Wikipedia) voraus.
Sensoren — eventuell
Eine Wahrnehmung der Umgebung war ursprünglich vorgesehen, wurde jedoch verschoben.
Es gab Pläne, den Schlupf der Räder zu verringern, in dem die Relativbewegung zum Papier mit Mausmodulen (Computermaus) gemessen und die Position entsprechend korrigiert wird.
Ein anderer Plan war, mithilfe eines Helligkeitssensors, der schwarz von weiß unterscheiden kann, die Papierkante zu finden. Der Algorithmus, um von einem zumindest ungefähr bekannten Punkt den Ursprung des Papiers zu finden, ist unten skizziert. Der Algorithmus könnte hin und wieder besonders nach komplexen Formen ausgeführt werden, und so eine komplexe Lokalisierung umgehen. Der Algorithmus funktioniert besonders deshalb, weil die Fehler innerhalb einer einzigen Bewegung (zum beispiel einer Drehung um 90°) sehr gering sind. Vorraussezung ist, das der Helligkeitssensor möglichst nahe Am Stift liegt, oder zumindest in einem definierten Abstand auf einer Achse vertikal zu der Motorachse.

Lokalisierung — eher nicht
Ursprünglich war ja eine Lokalisierung von malokal geplant. Wir wussten nicht, wie genau die Motoren sein würden und hatten anfangs auch daran gedacht, malokal draußen auf großen Flächen fahren zu lassen. Letzteres ist im laufe des Projekts in den Hintergrund gerückt, und es hat sich herausgestellt, dass die Schrittmotoren äußerst präzise arbeiten. Ein bisschen Schlupf ist zwar vorhanden, wird aber durch Beschleunigung und Abbremsen minimiert. Lediglich Winkelabweichungen sind nach wie vor ein Problem. Allerdings sind diese nicht so schlimm. Daher wurde die Lokalisierung vertagt. Bis jetzt sieht es auch so aus, als würden wir uns damit (zumindest vor Abgabe der Doku) nicht mehr beschäftigen können. Ausserdem hatten wir Probleme, uns eine gute technische Umsetzung für die Lokalisierung zu überlegen, die die erforderliche Präzision erreicht. Im Moment kann malokal nach einer komplexen Form kurz angehalten und der Winkel manuell (ferngesteuert) korrigiert werden. So können auch schon jetzt komplexe und große Zeichnungen umgesetzt werden.
Outdoor-Tauglichkeit — eher nicht
Malokal könnte in Zukunft auch draußen zeichnen. Dafür müssten eventuell die Motoren aufgerüstet werden und die Räder an andere Untergründe angepasst werden. Eine glatte Betonfläche sollte sich jedoch nicht all zuweit von innenliegenden Fußböden unterscheiden. Schwerer wäre das Zeichnen auf unbekannten Untergründen wie grobem Asphalt. Das Zeichenmittel müsste noch auf die Untergründe abgestimmt werden. Auf Asphalt könnte Kreide verwendet werden, wenn die Reibung und damit die Fehler nicht zu groß werden.