Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
Dokumentation
Einleitung
Der Flowerbotter ist eine Art intelligentes Mini-Gewächshaus. Er besteht aus einem 50 x 50 x 50 cm großen Modul, das mit 3 Blumentöpfen ausgestattet ist, welche einen Feuchtigkeitssensor, sowie eine Wasserzufuhr beinhalten. Hier kannst du deine Pflanzen einpflanzen, damit sie automatisch gegossen werden, während du im Urlaub bist oder sie gleich bis zur Ernte im Flowerbotter belassen. Er eignet sich auch super für ein kleines Kräuterbeet in der Küche.
Der Flowerbotter misst in regelmäßigen Abständen die Bodenfeuchtigkeit und entscheidet dann ob die Pflanzen gegossen werden müssen. Bei zu trockenem Boden, werden die Magnetventile geöffnet und somit die Pflanzen bewässert. Jeder Blumentopf kann hierbei separat angesteuert werden, damit verschieden Pflanzen auch unterschiedlich gegossen werden können.
Bei unserer Recherche für diesen Roboter sind wir auf ähnliche Projekte gestoßen. So gibt es in den USA eine autonome Farm, wo fast alle Arbeitsschritte von Robotern übernommen werden.
https://www.theverge.com/2018/10/9/17950502/robot-farm-future-iron-ox-agriculture-automation
Außerdem gibt es einen Kräutergarten für die Küche, der aber ziemlich klein ist und auch nicht gerade günstig.
Konstruktion
Modul
Wir haben viel Zeit in das Modul gesteckt. Wir haben uns für die Innenmaße 50 x 50 x 50cm entschieden, damit auf der einen Seite die Pflanzen genügend Platz zum wachsen haben und auf der anderen Seite das Modul nicht zu klobig und unhandlich wird.
Durch das Plexiglas gelangt das Sonnenlicht zu den Pflanzen und es muss nicht künstlich belichtet werden. Eine der
Plexigalsscheiben ist mit Schanieren am Boden befestigt, sodass sich diese öffnen lässt um das Modul zu befüllen oder die Pflanzen zu ernten.
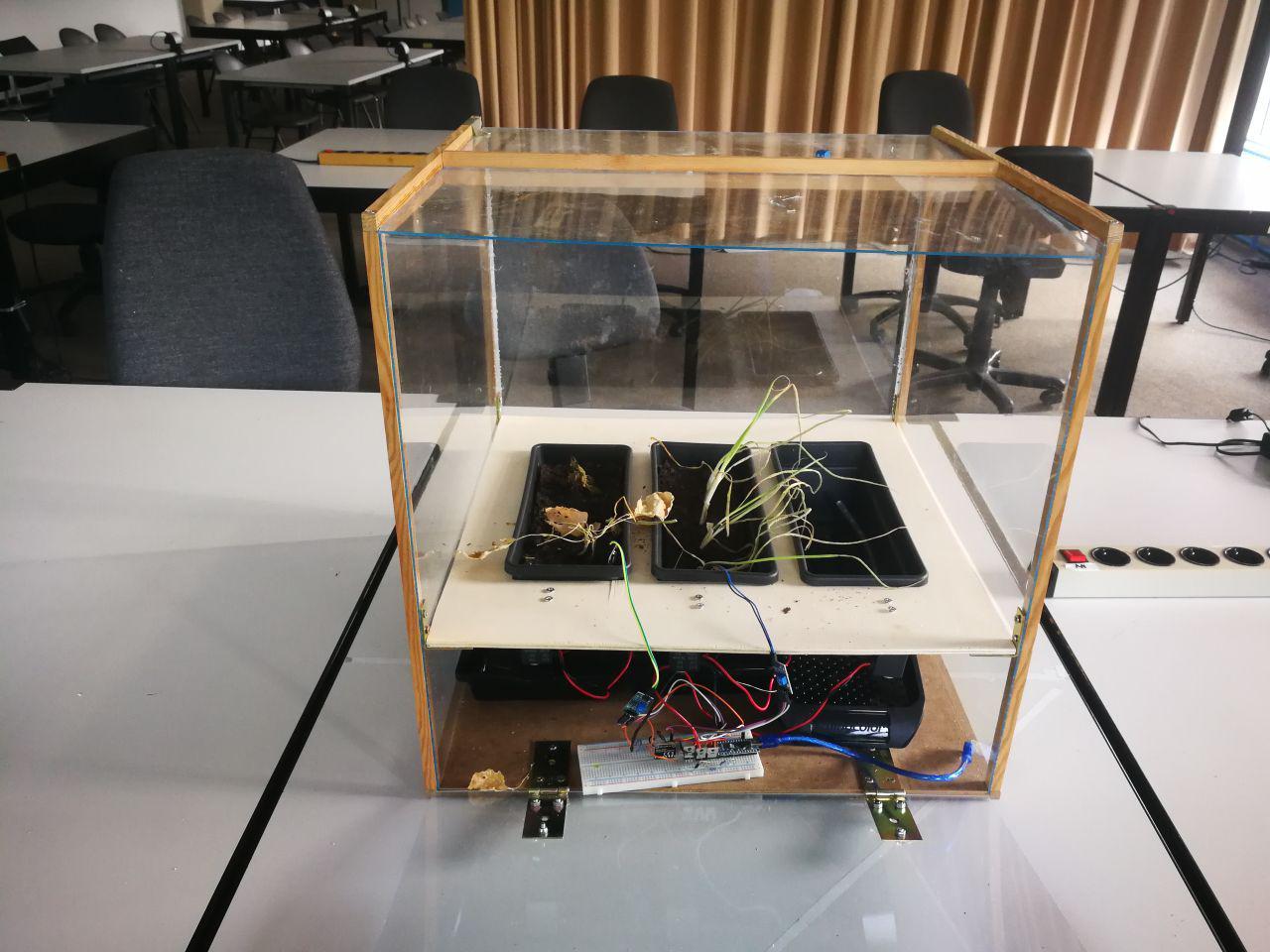
Abbildung 1 - Das Modul
Das außenliegende Gestell wollten wir erst aus Stahl bauen, haben uns dann aber doch für eine Holzkonstruktion entschieden. Diese ist leichter als die Stahlalternative und harmonisiert besser mit den Pflanzen.

Abbildung 2 - Das Gestell
Für die Bodenplatte haben wir MDF verwendet. In diese haben wir eine Nut gefräst, um so die Plexiglasscheiben zu stabilisieren.

Abbildung 3 - Die Bodenplatte
Einsatz
Für den Einsatz haben wir eine ca. 50 x 50 x 50cm Holzplatte genommen. In dieser befinden sich drei Einlässe für die Blumentöpfe.

Abbildung 4 - Die Holzplatte
Die Blumentöpfe hängen somit über dem Boden, damit das überschüssige Wasser gut abtropfen kann. Unter ihnen befinden sich drei Auffangbecken, die einfach herausgenommen werden können. Auf der Unterseite der Einsatzplatte sind die Magnetventile befestigt, welche wiederum über Schläuche mit den Blumentöpfen in der einen Richtung und mit dem Wassertank in die andere Richtung verbunden sind.

Abbildung 5 - Das Magnetventil
Schaltung

Abbildung 6 - Die Steckplatine
Die Feuchtigkeitssensoren nutzen eine Spannung von 3,3 -5 V. Diese kann vom Arduino geliefert werden. Der Feuchtigkeitssensor hat einen Anschluss für die Stromversorgung und einen um die Werte zu übergebe. Diese Werden von der Auswert-Elektronik weiter gegeben und an den Arduino weitergeleitet. Die übermittelten Werte werden von der Software ausgewertet und in „feucht“, „trocken“, „nass“ und „nicht in Erde“ umgerechnet.

Abbildung 7 - Feuchtiggkeitssensor-Schalplan [http://qqtrading.com.my/soil-moisture-sensor-yl-69-hygrometer-w-hc-38-module-board-lm393]
Um die Magnetventile an zu steuern ist eine größere Spannung als 5 V gefordert. Diese wirde jedoch nicht vom Arduino unterstützt. Mithilfe eines Netzteils und ein paar weiteren Bauteilen wie einem Mosfet und ein paar wiederst#nden kann die Spannung vom Arduino jedoch gesteuert werden. Damit der Arduino regeln kann wann der Strom fließt und wann er wieder stopt muss er an einen Mosfet angeschlossen sein. Dieser bekommt die Spannung vom Netzteil. Wenn das Gate geöffnet wird kann Strom fließen und das Ventil öffnet sich. Sobald der Arduino das Gate wieder schließt, schließt sich das Ventil und der Wasserfluss wird wieder unterbrochen.

Abbildung 8 - Arduino MOSFET Schaltung [https://www.mintgruen.tu-berlin.de/robotikWiki/doku.php?id=techniken:schalten]
Vernwendeter Code: flowerbotter.zip
Funktionsweise
Wasserversorgung

Abbildung 9 - Der Schlauch
Um die Pflanzen mit Wasser zu versorgen wurde ein Schlauch mit vielen kleinen Löchern versehen und in die Erde gelegt. Dieser ist an das Arduino gesteuerte Magnetventil angeschlossen. Das Ventil ist wiederum mit dem Schlauch des Wassertanks verbunden. Dieser befindet sich außerhalb des FlowerBotters. Damit das Wasser aus dem Schlauch in die Erde fließt muss ein bestimmter Wasserdruck vorhanden sein. Dieser kann durch das anheben und absenken des Wassertanks verändert werde. Um einen optimalen Wasserfluss zu erreichen wird der Kanister mindestens 30 cm über dem schlauch Ausgang platziert werden. Mithilfe der Magnetventile kann nun die Wasserzufuhr an und ausgeschaltet werden.

Abbildung 10 - Der Wassertank
Kalibrierung der Sensoren
Der Feuchtigkeitssensor gibt Werte zwischen 0 und 1024 zurück. Diese werden anhand experimentell ermittelter Daten in eine Feuchigkeitsskala umgerechnet. Um diese Werte zu bekommen, wurde der Sensor einmal in komplett trockene Erde gesteckt. Dieser Wert wird als 0 Punkt definiert. Alle Werte unterhalb dieses Wertes werden als „nicht in Erde “ gewertet. Um den maximal Wert zu ermittelt wurde der Sensor in Wasser gehalten. der 3. Testpunkt wurde mithilfe von Erde ermittelt, welche ausgiebig gegossen wurde.

Abbildung 11 - Der Feuchtigkeitssensor
Ergebnis und Diskussion
Der FlowerBotter funktioniert im Prinzip so wie gedacht. Die Feuchtigkeitssensoren messen den Zustand der Erde und schicken Werte an den Arduino, welcher diese dann ausgewertet. Bei zu trockener Erde wird Mithilfe der Magnetventile die Erde bewässert, um den Feuchtigkeitswert zu verändern.
Das gesamte Modul hätte noch wesentlich weiter ausgebaut werden können.
Viele Funktionen, die wir uns im Voraus überlegt haben, wurden leider nicht mit in den FlowerBotter integriert. Wir haben uns ein bisschen verschätzt mit unserem Zeitmanagement. Dadurch das wir viel Zeit am Anfang in das Design und die Art der Umsetzung investiert haben, wurde der technische Aspekt mit den verschiedenen Sensoren und Aktoren etwas vernachlässigt.
Wir hätten die verschiedenen Arbeitspakete am Anfang besser aufteilen sollen. So waren immer alle 3 Person an der gleichen Sache beteiligt und wir sind nur langsam vorangekommen.
Dadurch das wir sofort viele verschiedene Sensoren mit im Flowerbotter integriert haben wollten, sind wir am Anfang zu viele Schienen gleichzeitig gefahren. Daraufhin haben wir uns entschieden erst einmal die Grundidee um zu setzten, sodass die pflanzen bewässert werden und der Arduino immer weiß ob die Erde trocken oder feucht ist. Durch unsere Zeitmanagement-Probleme haben wir diesen Teil erst am Ende fertigbekommen.
Somit hatten wir leider keine Zeit mehr die ganzen anderen Funktionen mit zu integrieren wie z.B. Belüftung, variable Belichtung mithilfe von Abdeckungen und künstlicher Beleuchtung, sowie PH Wert Sensor, Luftfeuchtigkeitssensor und Lichtsensor.