Benutzer-Werkzeuge
Seitenleiste
techniken:punktansteuern
Mit einem 2-Rad-Roboter gezielt einen Punkt anfahren
In Bearbeitung!
Viele von euch werden an irgendeinem Punkt ihren Roboter an einen vorgegebenen Punkt fahren lassen.
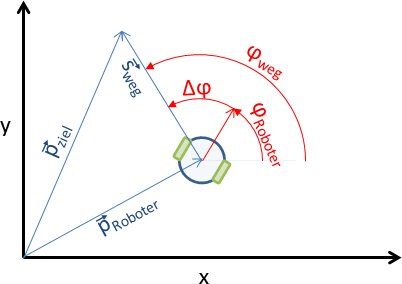
Dieser Artikel geht davon aus, dass ihr sowohl die Koordinaten des Roboters $p_{Roboter}$ (z.B. mit diesem Verfahren) als auch die Koordinaten des Zielpunktes $p_{Ziel}$ kennt, und berechnen wollt, wie sich die Räder drehen müssen, damit ihr in die Richtung des Zielpunktes fahrt.
techniken/punktansteuern.txt · Zuletzt geändert: 2016/08/05 18:31 von fbonowski