Benutzer-Werkzeuge
Seitenleiste
Dies ist eine alte Version des Dokuments!
Wie Stelle ich meine Messdaten sinnvoll dar?
Zunächst solltet ihr euch klar machen was für Daten vorliegen, daraus ergibt sich oftmals bereits eine sinnvolle Darstellung. Im Labor werdet ihr häufig mit Sensordaten zu tun haben welche über einen Zeitraum gemessen werden. Da der Arduino digital arbeitet erhaltet ihr beim Messen ein asdasd
Software mit Syntax
Software mit grafischem Menü
Alter Artikel, wird gelöscht
Motivation
Höchstwahrscheinlich wird euer Roboter mit Sensoren ausgestattet die ihm ermöglichen seine Umwelt wahrzunehmen. Sensoren liefern euch Informationen wie z.B. Entfernungen, Temperatur, Spannung oder Rad-Umdrehungen (Odometrie). Jedoch liegen diesen Informationen häufig nicht direkt in den geläufigen Maßeinheiten vor, etwa [m] bei Entfernungen. In der Regel wird euer Mikrocontroller eine Spannung als Messwert erhalten die sich proportional zur interessierenden Größe verhält.
Ein einfaches Beispiel ist der Fototransistor. Der Mikrocontroller liefert Werte zwischen 0-1024, was einer Spannung zwischen 0-5V entspricht (Arduino), je nach dem ob es sehr hell ist im Raum oder dunkel. Wenn man diese Daten weiter verarbeiten möchte ist es sinnvoll zu wissen ob der Zusammenhang von Helligkeit und Spannung linear ist oder evtl. einer exponentiellen Regel folgt (jeder andere Zusammenhang ist auch denkbar). In der Regel konstruiert man hierzu eine Messreihe. Im Falle des Fototransistors könnte man wie folgt vorgehen: In einer kontrollierten Umgebung wird der Sensor verschiedenen Helligkeitsstufen ausgesetzt. Zu jeder Helligkeitsstufe werden mehrere Messungen durchgeführt über die anschließend gemittelt wird. Die gesammelten Daten werden gespeichert für die weitere Auswertung, womit wir zum Pudels Kern kommen.
Was für Ergebnisse können wir erwarten?
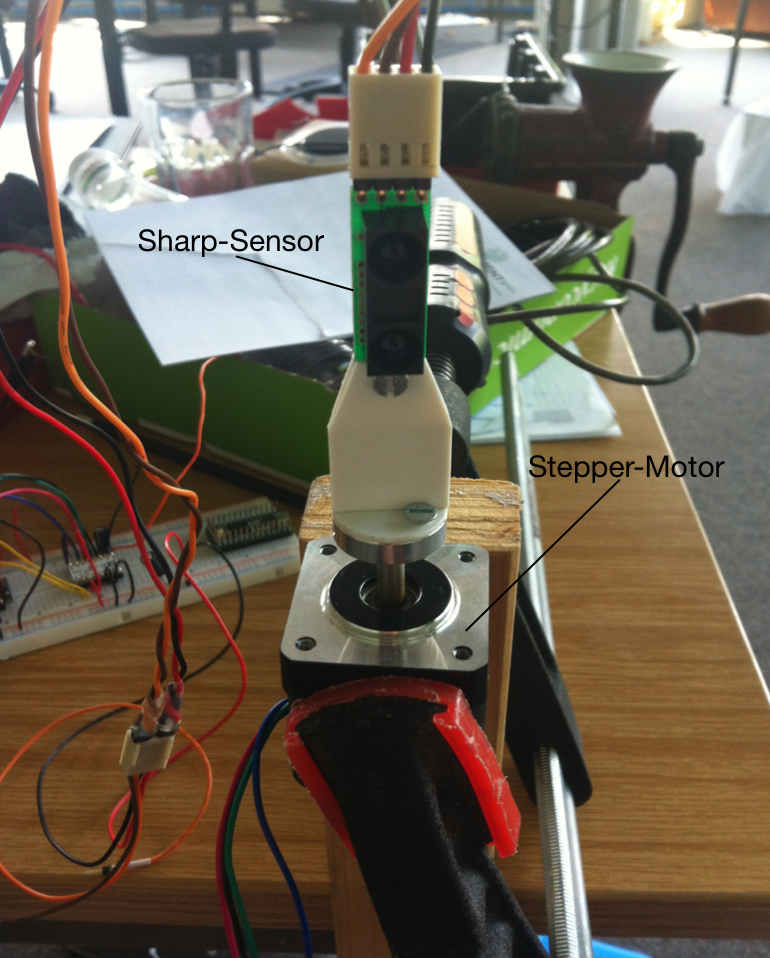
In diesem Artikel betrachten wir folgenden Aufbau: Ein Sharp GP2Y0A60SZLF wird an einem Stepper-Motor befestigt und misst Entfernungen während der Motor rotiert. Ziel ist ein 360° Ausschnitt aus der Umgebung, außerdem interessiert uns die Dauer einer rundum Messung. Zunächst lohnt ein Blick auf die Website des Herstellers bzw. Suche nach dem Datenblatt des Sensors. In diesem Fall ist die Hersteller-Website bereits ausreichend: Pololu. Für die Auswertung relevante Informationen:
- Messbereich 10 - 150cm
- Messfrequenz 60Hz
- Stepper: 360°/200Steps = 1.8° pro Step
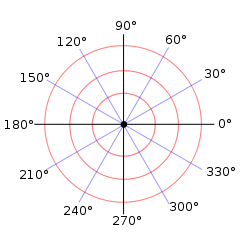
Aus der Art des Versuchsaufbaus und den technischen Daten lässt sich bereits ableiten wie die Daten am besten darzustellen sind. In einem normalen Diagramm würden wir die gemessenen Entfernungen auf der Ordinate auftragen und die korrespondierenden Winkel auf der Abszisse. Als zusätzliche Information sollte die Dauer der Messung in das Diagramm eingetragen werden. Die Einheit und Genauigkeit der Achsen wird entsprechend der Messwerte gewählt. Eine weitere Möglichkeit wäre die Darstellung in einem Polargitter: