Benutzer-Werkzeuge
Seitenleiste
Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
Plagenbekämpfung
Projektziel
Wir wollen die Verbreitung von Heuschreckenschwärmen abhängig von unterschiedlichen Parameter simulieren und in einem Spiel - ähnlich wie
Plague Inc. - visualisieren. Dabei wollen wir möglichst realitätsnah bleiben und aktuelle Erkenntnisse mit einbeziehen.
Teilnehmer*innen
Benedikt
Valentin
Juanita
Emma
Projektseiten
Research Plagensimulation
Projektplan Plagensimulation
Protokoll Plagensimulation
Code Plagensimulation
Dokumentation
1. Projektbeschreibung
Was ist das Ziel unseres Projekts?
Wir wollen inspiriert von der aktuellen Heuschreckenplage in Ostafrika Heuschreckenplagen simulieren und visualisieren. Dabei betrachten wir das Schwarmverhalten der Heuschrecken und äußere Einflussfaktoren wie Futterquellen und Bekämpfung (z.B. durch Pestizide). Dabei wollen wir möglichst realitätsnah bleiben und aktuelle Erkenntnisse mit einbeziehen.
Was ist Schwarmverhalten?
Schwarmverhalten bezeichnet den Zusammenschluss von Tiere zu Aggregationen, dabei bewegen sich die Individuen in eine gemeinsame Richtung.Daraus ergeben sich Vorteile bei der Nahrungssuche und erhöhter Schutz vor Fressfeinden. Typische Schwarmtiere sind Fische, Vögel und Insekten wie die Wander- und Wüstenheuschrecken.
Wie funktioniert die Schwarmbildung bei Heuschrecken?
Panik und Nahrungsmangel lösen bei Heuschrecken Kannibalismus aus. Die kollektive Bewegung im Schwarm verringert das Risiko des Kannibalismus für die einzelnen Individuen. Dabei verfolgen die Tiere ihre Artgenossen und fliehen gleichzeitig vor denen, die sie selbst jagen.
Die Schwarmbildung wird durch räumliche Nähe zu Artgenossen ausgelöst und führt zu Veränderung in Gestalt und Verhalten. Die unterschiedliche Färbung von Einzelgängern (solitären Phase) und Schwarmtieren (gregäre Phase) lässt sich in der folgenden Grafik gut erkennen.

2. Implementierung von Schwarmverhalten
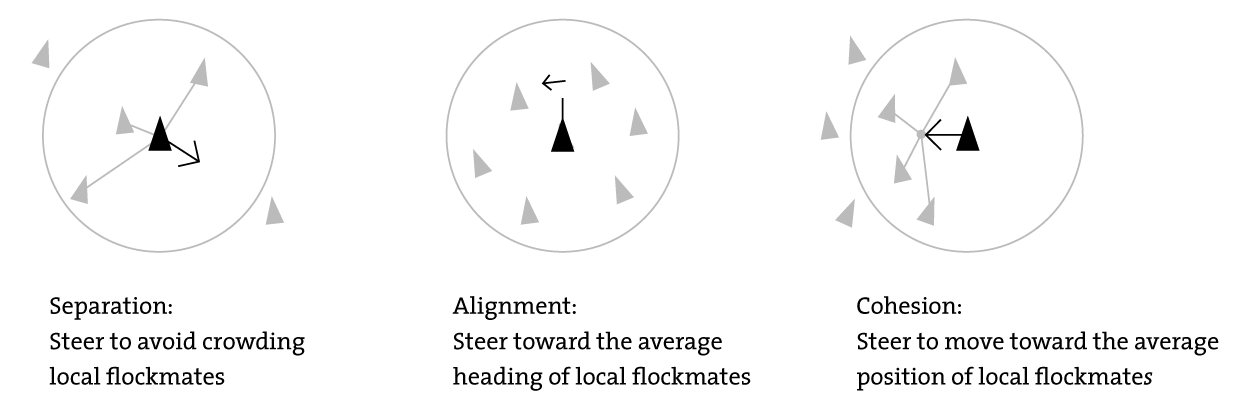
Schwarmverhalten lässt sich mithilfe von boids (von engl. „bird-oid object“) simulieren. Boids wurden 1986 von Craig Reynolds entwickelt. Sie bestehen aus miteinander interagierenden Agenten, die mithilfe von drei einfachen Regeln emergentes Verhalten darstellen. Diese drei Regeln sind:
- Separation: wählt eine Richtung, die einer Häufung von Boids entgegenwirkt
- Angleichung: wählt eine Richtung, die der mittleren Richtung der benachbarten Boids entspricht
- Zusammenhalt: wählt eine Richtung, die der mittleren Position der benachbarten Boids entspricht
 Grafik aus http://coffeepoweredmachine.com/wp-content/uploads/2013/08/boidsThreeRules.png
Grafik aus http://coffeepoweredmachine.com/wp-content/uploads/2013/08/boidsThreeRules.png
{kind=link}
Im Folgenden einige GIFs zu unserer eigenen Implementierung dieser Regeln, zunächst alle kombiniert und dann die drei Regeln im Einzelnen.

Separation
def seperation(self,boid,ind): #gleich dem allignment, bloß mit der der differenz dem normierten Abstand(differenz der Positionen)
dist = Vector(0,0)
count = 0
for i in ind[0]:
if boid[i].position != self.position:
dist += (self.position - boid[i].position)/np.linalg.norm(boid[i].position - self.position)
count += 1
if count > 0 :
dist /= count
dist = (dist /np.linalg.norm(dist)) * self.max_speed
dist -= self.velocity
dist = (dist /np.linalg.norm(dist)) * self.max_force
self.acceleration += dist

Alignment
def alignment(self,boid,ind):
avg = Vector(0,0)
count = 0
for i in ind[0]: #Für alle Elemente in Ind (Nachbarn innerhalb bestimmtem Radius/ Die k nähesten Nachbarn) wird gecheckt ob ihre Position der Eigenen entspricht(nur bei sich sebst der Fall)
if boid[i].position != self.position:
avg += boid[i].velocity #Alle Geschwindigkeitsvektoren der Nachbarn werden zusammenaddiert
count += 1 #Anzahl der Nachbarn wird gezählt
if count > 0: #Bei mehr als Null Nachbarn wird der Durchschnittsvektor berechnet, normiert und mit der maximal Geschwindigkeit multipliziert. Anschließend wird der eigene Geschwindigkeitsvektor subtrahiert und der Vektor wird ein weiteres mal Normiert und mit der maximal Kraft multipliziert.
avg /= count
avg = (avg /np.linalg.norm(avg)) * self.max_speed
avg -= self.velocity
avg = (avg /np.linalg.norm(avg)) * self.max_force
self.acceleration += avg #Ergebniss wird zu dem Beschleunigungsvektor addiert

Cohesion
